【CW32模块使用】语音合成播报模块
SYN6288E 中文语音合成芯片是北京宇音天下科技有限公司在 2010 年初推出的一款性/价比更高的 SYN6288 芯片的基础上更改封装方式的,效果更自然的一款中高端语音合成芯片。SYN6288E 通过异步串 口(UART)通讯方式,接收待合成的文本数据,实现文本到语音(或 TTS 语音)的转换。
一、模块来源
模块实物展示:

资料链接:https://pan.baidu.com/s/1FjoAuJm387bxaZxS6g9HEg
资料提取码:8888
二、规格参数
输入电压:2.4V~5.1V
额定电流:2.0uA~280mA
控制方式:串口
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够播报语音的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
语音播报控制,只要配置出串口,再根据数据手册要求的命令帧格式发送数据,就能实现播报功能。
注意!该模块只能实现语音播报,没有语音识别功能!也无法录音。
3.2引脚选择
想要使用uart串口,需要确定使用的引脚是否有串口外设功能,可以通过用户手册进行查看。在用户手册的第146页。
这里选择使用PA2和PA3的附加串口2功能。
有串口功能的引脚
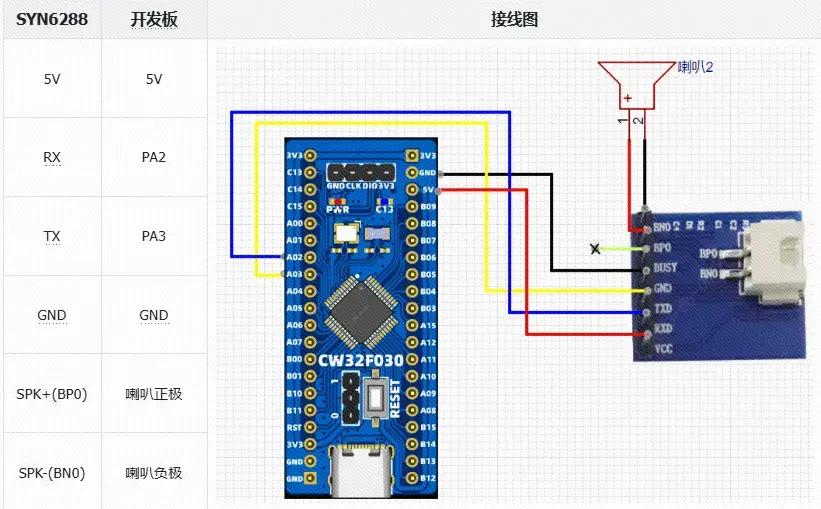
模块接线图
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_syn6288.c与bsp_syn6288.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_syn6288.c中,编写如下代码。
/*
* Change Logs:
* Date Author Notes
* 2024-06-25 LCKFB-LP first version
*/
#include "bsp_syn6288.h"
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
#define SYN6288RX_LEN_MAX 255
unsigned char SYN6288RX_BUFF[SYN6288RX_LEN_MAX];
unsigned char SYN6288RX_LEN = 0;
/******************************************************************
* 函 数 名 称:SYN6288_GPIO_Init
* 函 数 说 明:SYN6288引脚初始化
* 函 数 形 参:band_rate GPS通信波特率
* 函 数 返 回:无
* 作 者:LC
* 备 注:默认波特率为9600
******************************************************************/
void SYN6288_GPIO_Init(uint32_t band_rate)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
BSP_SYN6288_GPIO_RCC_ENABLE(); // 使能GPIO时钟
BSP_SYN6288_UART_RCC_ENABLE(); // 使能UART时钟
GPIO_InitStruct.Pins = BSP_SYN6288_TX_PIN; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高
GPIO_Init(BSP_SYN6288_GPIO_PORT, &GPIO_InitStruct); // 初始化
GPIO_InitStruct.Pins = BSP_SYN6288_RX_PIN; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入
GPIO_Init(BSP_SYN6288_GPIO_PORT, &GPIO_InitStruct); // 初始化
BSP_SYN6288_AF_UART_TX(); // UART_TX复用
BSP_SYN6288_AF_UART_RX(); // UART_RX复用
// 配置UART
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = band_rate; // 波特率
USART_InitStructure.USART_Over = USART_Over_16; // 配置USART的过采样率。
USART_InitStructure.USART_Source = USART_Source_PCLK; // 设置时钟源
USART_InitStructure.USART_UclkFreq = 64000000; //设置USART时钟频率(和主频一致即可)
USART_InitStructure.USART_StartBit = USART_StartBit_FE; //RXD下降沿开始
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位1
USART_InitStructure.USART_Parity = USART_Parity_No ; // 不使用校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(BSP_SYN6288, &USART_InitStructure); // 初始化串口2
// 优先级,无优先级分组
NVIC_SetPriority(BSP_SYN6288_IRQ, 0);
// UARTx中断使能
NVIC_EnableIRQ(BSP_SYN6288_IRQ);
// 使能UARTx RC中断
USART_ITConfig(BSP_SYN6288, USART_IT_RC, ENABLE);
}
/******************************************************************
* 函 数 名 称:SYN6288_Send_Bit
* 函 数 说 明:向SYN6288发送单个字符
* 函 数 形 参:ch发送的字符
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void SYN6288_Send_Bit(unsigned char ch)
{
USART_SendData(BSP_SYN6288, (uint8_t)ch);
while( RESET == USART_GetFlagStatus(BSP_SYN6288, USART_FLAG_TXE) ){} // 等待发送数据缓冲区标志置位
}
/******************************************************************
* 函 数 名 称:SYN6288_send_String
* 函 数 说 明:SYN6288发送字符串
* 函 数 形 参:str要发送的字符串
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void SYN6288_send_String(unsigned char *str)
{
while( str && *str ) // 地址为空或者值为空跳出
{
SYN6288_Send_Bit(*str++);
}
}
//获取串口接收的数据
unsigned char *Get_SYN6288RX_BUFF(void)
{
return SYN6288RX_BUFF;
}
//清除串口接收的数据
void Clear_SYN6288RX_BUFF(void)
{
unsigned char i = SYN6288RX_LEN_MAX-1;
while(i)
{
SYN6288RX_BUFF[i--] = '�';
}
SYN6288RX_LEN = 0;
}
/************************************************************
* 函数名称:SYN6288_Send_Cmd
* 函数说明:向SYN6288发送命令
* 型 参:
* 【CmdType=命令字】 可使用参数有:
* 0x01 语音合成命令
* 0x31 设置波特率(默认9600)
* 0x02 停止合成命令
* 0x03 暂停合成命令
* 0x04 恢复合成命令
* 0x21 芯片状态查询命令
* 0x88 芯片进入低功耗模式
* 【CmdPar=命令参数】 可使用参数有:
* 字节高5位的十进制为0时,表示不加背景音乐
* 字节高5位的十进制为1~15时,表示所选背景音乐的编号
* 字节低3位的十进制为0~3,并且命令字为语音合成命令时,分别代表设置文本为GB2312格式、GBK格式、BIG5格式、UNICODE格式;
* 字节低3位的十进制为0~2,并且命令字为设置波特率时,分别代表设置波特率为9600、19200、38400;
* 【text=播报的文本】
* 返 回 值:0=发送成功
* 备 注:
* 接收到控制命令帧,芯片会向上位机发送1个字节的状态回传,上位机可根据这个回传来判断芯片目前的工作状态
* 初始化成功回传 0X4A
* 收到正确的命令帧回传 0x41
* 收到不能识别命令帧回传 0x45
* 芯片播音状态回传 0x4E
* 芯片空闲状态回传 0x4F
*************************************************************/
unsigned char SYN6288_Send_Cmd(uint8_t CmdType, uint8_t CmdPar, uint8_t *text)
{
unsigned char frame_header = 0XFD; //帧头
unsigned int Text_Len = strlen((const char*)text);//待发送文本的长度
unsigned int Data_Len = Text_Len + 3; //数据区长度;3=帧头、帧尾和异或校验
unsigned char Xor_Check = 0; //异或校验存储
unsigned char Send_Buff[210]; //待发送的命令帧,命令帧最大206个字节
uint8_t i = 0;
Send_Buff[0] = frame_header; //帧头
Send_Buff[1] = Data_Len>>8; //高位在前
Send_Buff[2] = Data_Len&0x00ff; //低位在前
Send_Buff[3] = CmdType; //命令字
Send_Buff[4] = CmdPar; //命令数据
sprintf((char*)Send_Buff+5, "%s", text );
//发送数据
for( i = 0; i < Text_Len+5; i++ )
{
Xor_Check = Xor_Check ^ Send_Buff[i];//对每一个数据进行异或校验保存
SYN6288_Send_Bit( Send_Buff[i] );//发送数据
}
SYN6288_Send_Bit( Xor_Check );//发送最后一位:异或校验数据
return 0;
}
/******************************************************************
* 函 数 名 称:BSP_SYN6288_IRQHandler
* 函 数 说 明:串口中断服务函数
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void BSP_SYN6288_IRQHandler(void)
{
if(USART_GetITStatus(BSP_SYN6288,USART_IT_RC) != RESET) // 接收缓冲区不为空
{
SYN6288RX_BUFF[ SYN6288RX_LEN ] = USART_ReceiveData(BSP_SYN6288);
SYN6288RX_LEN = ( SYN6288RX_LEN + 1 ) % SYN6288RX_LEN_MAX;
SYN6288RX_BUFF[SYN6288RX_LEN] = '�';
USART_ClearITPendingBit(BSP_SYN6288, USART_IT_RC); // 清除中断标志位
}
}
在文件bsp_syn6288.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #ifndef _BSP_SYN6288_H #define _BSP_SYN6288_H #include "board.h" #define BSP_SYN6288_GPIO_RCC_ENABLE() __RCC_GPIOA_CLK_ENABLE() // GPIO端口时钟 #define BSP_SYN6288_UART_RCC_ENABLE() __RCC_UART2_CLK_ENABLE() // 串口2的时钟 #define BSP_SYN6288_AF_UART_TX() PA02_AFx_UART2TXD() #define BSP_SYN6288_AF_UART_RX() PA03_AFx_UART2RXD() #define BSP_SYN6288_GPIO_PORT CW_GPIOA // GPIO的端口 #define BSP_SYN6288_TX_PIN GPIO_PIN_2 // 串口TX的引脚 #define BSP_SYN6288_RX_PIN GPIO_PIN_3 // 串口RX的引脚 #define BSP_SYN6288 CW_UART2 // 串口2 #define BSP_SYN6288_IRQ UART2_IRQn // 串口2中断 #define BSP_SYN6288_IRQHandler UART2_IRQHandler // 串口2中断服务函数 void SYN6288_GPIO_Init(uint32_t band_rate); unsigned char SYN6288_Send_Cmd(uint8_t CmdType, uint8_t CmdPar, uint8_t *text); #endif
四、移植验证
在自己工程中的main主函数中,编写如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-25 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_syn6288.h"
int32_t main(void)
{
board_init();
uart1_init(9600);
SYN6288_GPIO_Init(9600);
printf("startrn");
delay_ms(1000);
SYN6288_Send_Cmd(0x01,0x00,(uint8_t *)"立创开发板");
while(1)
{
}
}
移植现象:模块播报"立创开发板"。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1eaj1otbe_v5xWZtn7We84w?pwd=LCKF
提取码:LCKF