人形机器人新品大爆发!突破关节极限,AI融合跨过“聪明”难关,进入万元阶段
电子发烧友网报道(文/莫婷婷)8月20日,《黑神话:悟空》正式上线后在国内引起关注。就在前一天,机器人公司宇树科技宣布 G1 人形机器人进行了量产设计升级,升级后能够进行单脚跳、360° 旋转跳等动作,官方也展示了其基于端到端和仿真训练使用棍棒的视频。让机器人也能像人一样灵活是机器人企业在不断努力的方向。
就在近期,国内多家机器人企业展示了公司最新的机器人进展,除了宇树科技,浙江人形机器人创新中心、星动纪元、逐际动力等都推出了新品,并且在技术、实用性等多个方面都实现了新的进展。

突破关节极限,人形机器人走向高扭矩、高转速
宇树科技的G1 人形机器人是其在5月发布的产品,定价 9.9 万元起。3个月后,宇树对其进行量产设计升级,也就是此次发布的是G1 量产版本,更符合量产要求。在性能上,宇树G1 人形机器人量产版单脚跳、360°旋转跳、上下楼梯等动作,平衡能力和控制能力都变得更强。
图:宇树科技G1 关节布置方案
宇树科技以机器狗赛道入局,但机器人的复杂度比机器狗要高很多,在动力性能、关节灵活度感知、交互。那么G1 人形机器人量产版的弹跳能力是基于哪些技术迭代实现的呢?
从其介绍来看,机器人的弹跳能力主要得益于其下肢设计和关节电机的最大扭矩。动态平衡控制、传感器的实时监测、算法的快速处理等多种技术的综合应用则保证机器人的稳定性。
根据介绍,宇树的G1身高约127cm,体重约35kg,最大关节扭矩达120N.m,总自由度(关节电机)43个。扭矩的性能是机器人进行强力跳跃的重要物理基础,扭矩的大小直接关联到机器人动作的爆发力,较大的扭矩输出让机器人能在瞬间释放能量,实现上升和前进的动力。此外,超大关节运动角度空间,为其带来了更强的灵活性。
另一家机器人企业星动纪元也发布了公司首款产品级人形机器人——STAR 1。从其产品参数来看,也实现了扭矩和转速的技术跨越。官方介绍,星动纪元突破关节极限,STAR 1最大关节扭矩400Nm,转速高达25rad/s。这使得星动STAR1最大奔跑速度高于6m/s,最大负载160kg,耐力负重、高爆发短跑。
机器人四肢的功能性和灵活性是设计的关键点,多自由度让机器人能够进行复杂的空间运动,提高其适应性和运动能力。通过独立控制每个关节,机器人可以调整其姿态以适应不同的地表。
STAR 1总自由度达到55个,四肢活动范围进一步提升。双腿有12个(6x2)自由度,双臂有14个(7X2)自由度,腰、颈各有3个和2个自由度,单手12个主动自由度。星动纪元表示,STAR 1有12 DOF全驱动,实现高精度触觉。
宇树科技的G1机器人配备了23到43个关节电机,拥有43个自由度,单手臂自由度为肩关节3个+肘关节2个+腕关节2个(选配),单腿自由度为髋关节3个+膝关节1个+踝关节2个,可以完成跳跃、旋转等复杂动作。由此看星动纪元STAR 1在运动性能上也不差,从其宣传图看到STAR 1还能举重。
图:星动纪元STAR 1
目前来看,浙江人形机器人创新中心的领航者2号NAVIAI和星动纪元STAR 1、宇树科技G1都为其机器人打造了高精度轻量化仿人臂,领航者2号NAVIAI单臂负载 5 公斤,操作精度 ≤0.1 mm。宇树科技G1单臂负载3公斤。
感知能力升级,灵巧手更智能
当前,机器人行业都在探索AGI(通用人工智能),具身智能被认为是通往AGI的关键之路。需要认识到的是具身智能是一个渐进化的过程,因为智能体需要收集听觉、视觉、定位等各种信息,需要有充足的传感器,例如视觉、触觉、惯性、距离、位置等传感器,为其打造学习基础。
在上肢逐渐成为人形机器人具身智能的焦点的时候,灵巧手成为其关键部件,更智能的灵巧手具备三个关键的特点,一是高自由度,这一点我们在上述提到的新品中都能看到。二是多传感器。三是结合落地场景的足够多的数据。更为重要的是,算法的落地也需要更加智能的灵巧手进行配合。
领航者2号NAVIAI灵巧手的自由度为6 DoF,指尖力10 N,关节速度150度/s。逐际动力发布的最新一代全尺寸人形机器人CL-2正是配备了全新的灵巧手,能够完成更多动作。
从近期发布的新品看到,人形机器人不仅在运动能力上实现了技术的跨越,在感知能力上同样迎来了迭代。
除了上述提到的灵巧手的感知,领航者2号NAVIAI还配备了多目环视相机、IMU、RGBD 传感器。宇树科技G1配备了3D LiDAR和RealSense深度摄像头。这些传感器让机器人能够实时感知和导航周围环境。STAR 1的手、眼(视觉传感器)位置的设计完全模拟人类,可以最大限度地复用人类数据,使得机器人在感知、识别、交互等方面更加自然流畅。
走向具身智能,AI+人形机器人实现落地
在走向具身智能的过程中,AI技术的高速发展为其带来了更多的可能性。那么AI跟机器人能够怎么融合,大模型接入机器人进展如何?
随着人形机器人需要处理的信息越来越多,我们在近期发布的人形机器人中也能看到机器人对于AI算力的需求也在不断提升。
星动纪元STAR 1的AI算力达到了275 TOPS,根据介绍,STAR 1 采用了硬件模块化设计理念,使得人形机器人的本体构造支持完全复用,智能算法能够实现无缝切换。STAR 1 内置AI大模型,支持模仿学习与强化学习,可以不断学习优化步伐稳定性和上肢灵活性。
领航者2号NAVIAI采用11代17高性能CPU,可升级13代17高性能CPU,GPU算力为275 TOPS。
在接入AI能力后,领航者2号NAVIAI具备拟人全身模仿学习、类人具身智能导航的能力。采用隐空间优化与融合模型预测控制的动作模仿学习,能够快速学习新动作,实现高自由度作业臂连续动态运动下稳定站立。类人具身智能导航的能力是采用大模型结合强化学习的决策规划框架,兼顾用户指令理解与开放空间感知。
深度强化学习算法也是近几年业内主流的技术路径,且发展得比较领先。宇树科技创始人兼CEO王兴兴表示,人形机器人和四足机器人可以使用几乎完全相同的深度强化学习算法。宇树科技的四足机器人、人形机器人的运作控制算法采用的是强化学习算法。
宇树科技G1可以选配NVIDIA Jetson Orin,采用端到端感知+深度强化学习的技术路径。端到端感知让人形机器人的智能交互导航能力更加精确,这也是宇树G1能够顺利判断楼梯上是否有障碍物、楼梯高度等因素,进行步态规划。
未来深度强化学习还能往更多的方向发展,王兴兴提到了四个方面,一是全身任意姿态或舞蹈等动作,模仿深度强化学习。二是复杂地形下,全身任意稳定运动。三是手部,复杂物品或零部件,较复杂灵巧操作。四是基于图像或深度数据,感知数据的强化学习导航避障。
关于AI大模型接入人形机器人,宇树科技在研发过程中也发现了一些问题,在接入AI大模型后,人形机器人具备了语音交互的能力,也可以让大语言模型规划一些功能让机器人去执行,“但实际上最终效果不是特别理想,因为做的事情都是提前规划好的动作和功能,如果超出这些认知范围,它的规划能是比较差的,并且每次的成功率并不是特别高。同样的一个问题,或者跟它讲一样的话,再次与它交流时,机器人有可能理解也不是特别到位。”王兴兴提到。
大语言模型在实现 AGI 的路上是否绕了很大的弯?未来是否有新的模型可以解决上述出现的问题,也需要机器人产业链上的企业共同突破。
小结:
从上述的新品中,也能看到不同的机器人企业打造了各自的技术优势,并且为其产品打造了差异化竞争。
例如领航者2号NAVIAI是首个具有精确技能作业能力的人形机器人,具备了通用高精智能操作的优势,突破了长序列操作任务行为决策与可泛化高精度伺服控制技术,支持物品搬运、物品抓放、伺服插孔。宇树科技G1在下肢稳定性、平衡能力也具备的技术优势,能够进行弹跳、后空翻等动作。星动纪元STAR 1则凭借其在扭矩、转速等明显的技术优势,运动灵活性和承载能力更强。
值得期待的是,在AI加速下的机器人技术,每天都在升级进化。也就是说,人形机器人将在使用过程中不断进化,或许今年是年龄为一岁的STAR 1,跟你生活一年甚至几年后,就已经能够更加懂你,且更加聪明了。
猜你喜欢
AI时代下的全新画质体验,海信电视E7N做到了么?

在人工智能技术飞速发展的今天,AI已经不仅仅是一个概念,而是开始真正融入并改变我们的日常生活。在电视行业,AI技术的应用正带来前所未有的画质体验。海信电视E7N,作为AI时代的先行者,通过其独特的技术优势,正在重新定义电视画质的新标准。...
Tag:人工智能你不知道的格力“超级工程”秘密

今日热点:大兴机场航站楼只用了17台空调。格力在北京大兴国际机场和深圳地铁12号线等超级工程中的应用令人瞩目。通过“移峰填谷”技术和永磁变频技术,格力中央空调实现了高效节能。此外,格力的光伏板与空调结合,推动了“零能耗”时代的到来。这些创新...
Tag:科技通信行业周报:三折叠屏引领消费电子潮流,AI+终端发展有望提速

(以下内容从上海证券《通信行业周报:三折叠屏引领消费电子潮流,AI+终端发展有望提速》研报附件原文摘录) 周行情 行情回顾:过去一周(2024.9.2-9.8),上证指数、深证成指涨跌幅分别为-2.69%、-2.61%,中信通信指数涨跌幅为...
Tag:人工智能【ESG动态】儒竞科技(301525.SZ)华证指数ESG最新评级CCC,行业排名第235

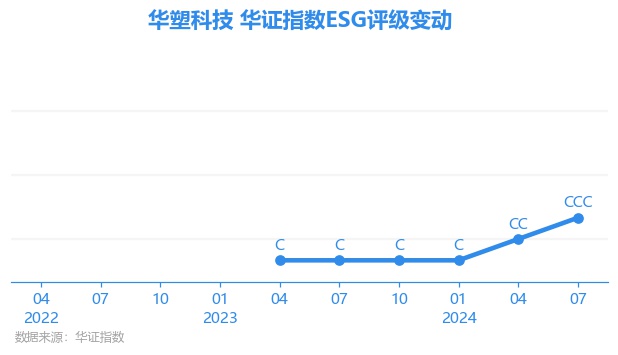
【ESG动态】华塑科技(301157.SZ)华证指数ESG最新评级CCC,行业排名第14